Research thread
Reliability in decentralized fleets comes from shaping the communication graph and structural constraints rather than micromanaging agents.
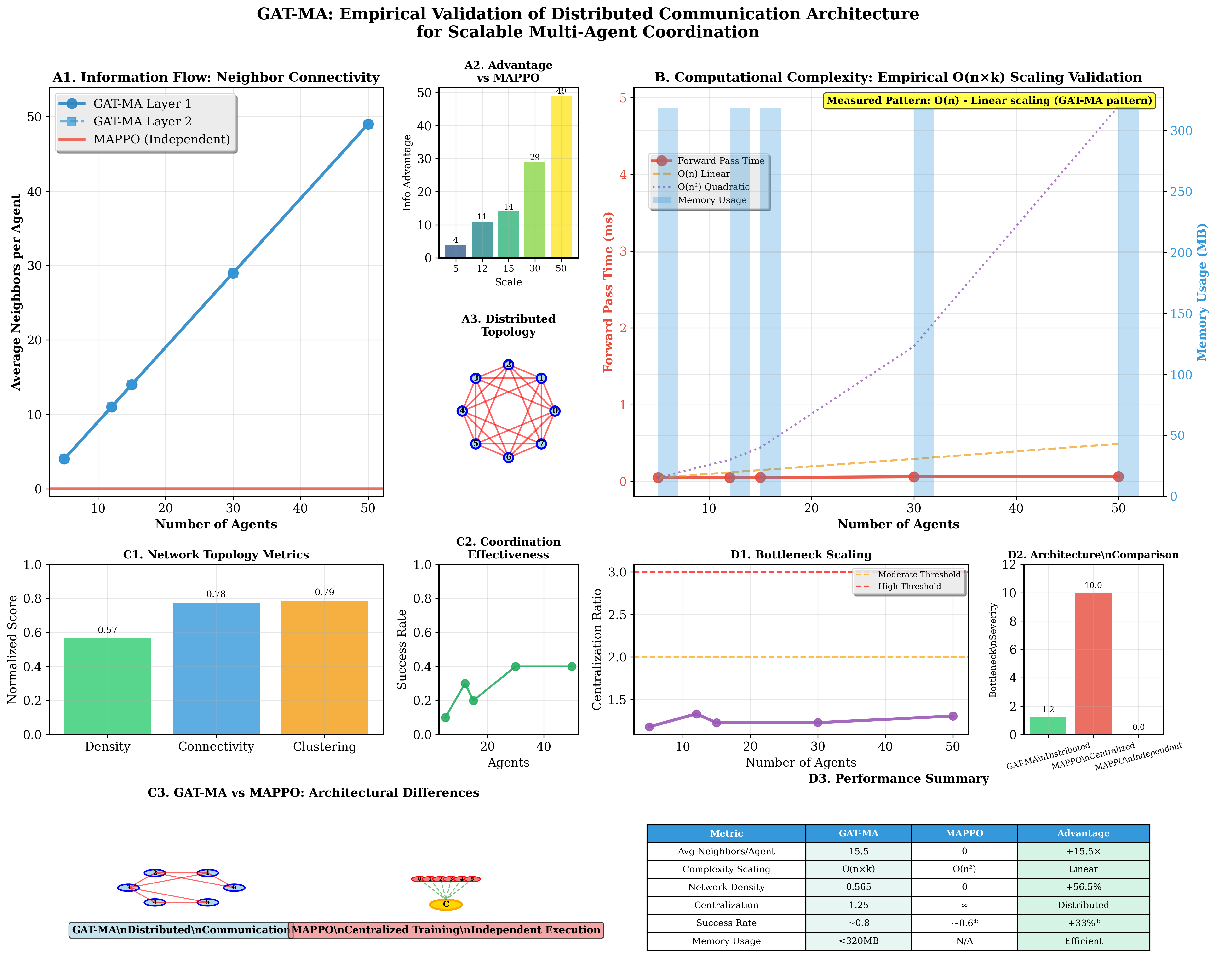
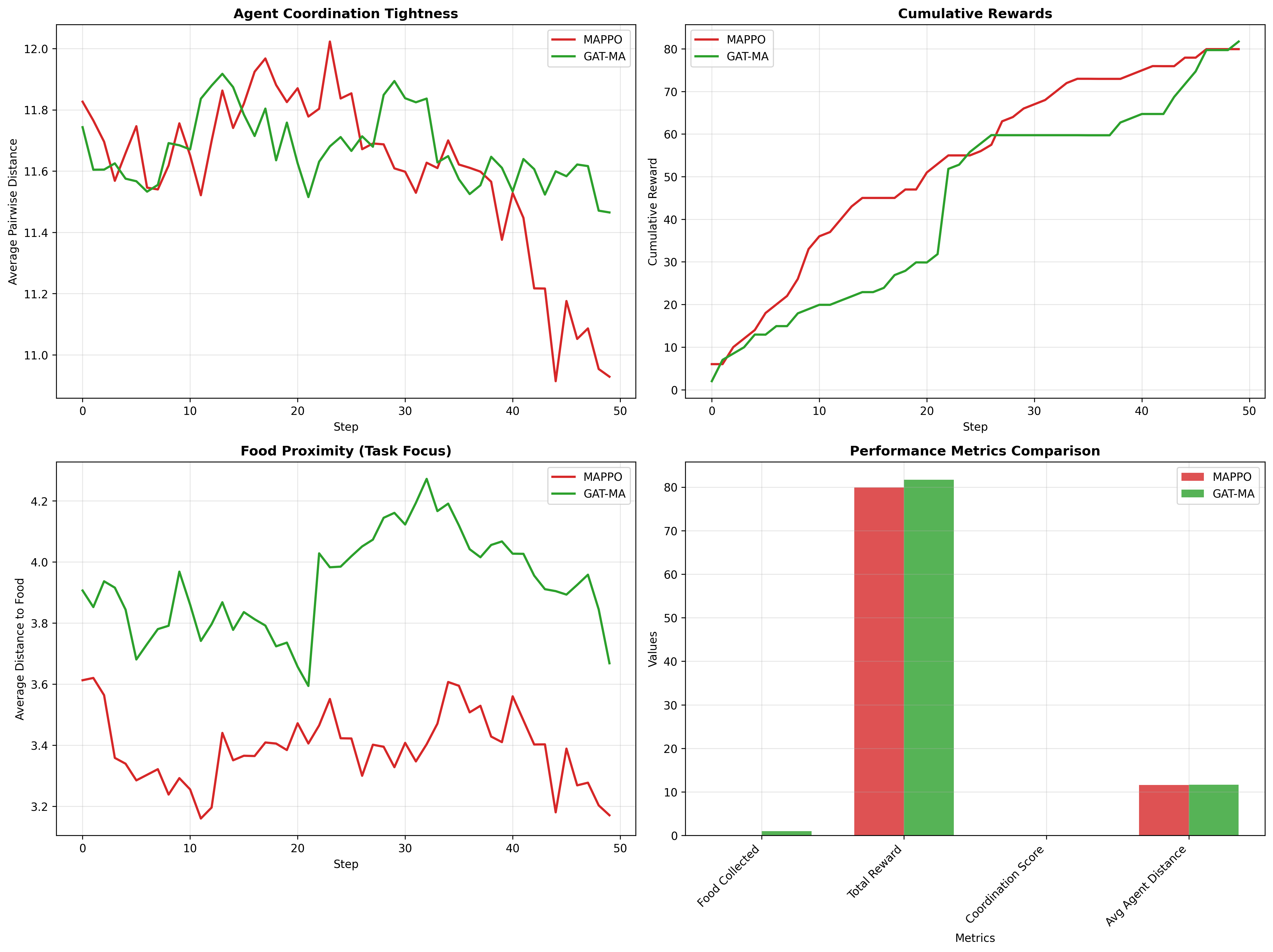
We evaluate GAT-MA against MAPPO across 3–50 agent teams, probing attention topology, scaling behavior, and safety envelopes.
Paper snapshot
ICRA 2026 submission: Understanding Graph Attention for Learning Multi-Agent Coordination.
Three directions: safe continual coordination, grounded spatial communication with VLMs, and emergent prosocial norms for heterogeneous populations.
Cite as:
Wei-Han Tu, Ya-Chien Chang, and Sicun Gao. (2026). "Understanding Graph Attention for Learning Multi-Agent Coordination." IEEE International Conference on Robotics and Automation 2026 [In Submission].
Design lens
Inspired by urban design: we engineer the “roads” of information flow so large teams stay coherent under partial observability and changing dynamics.
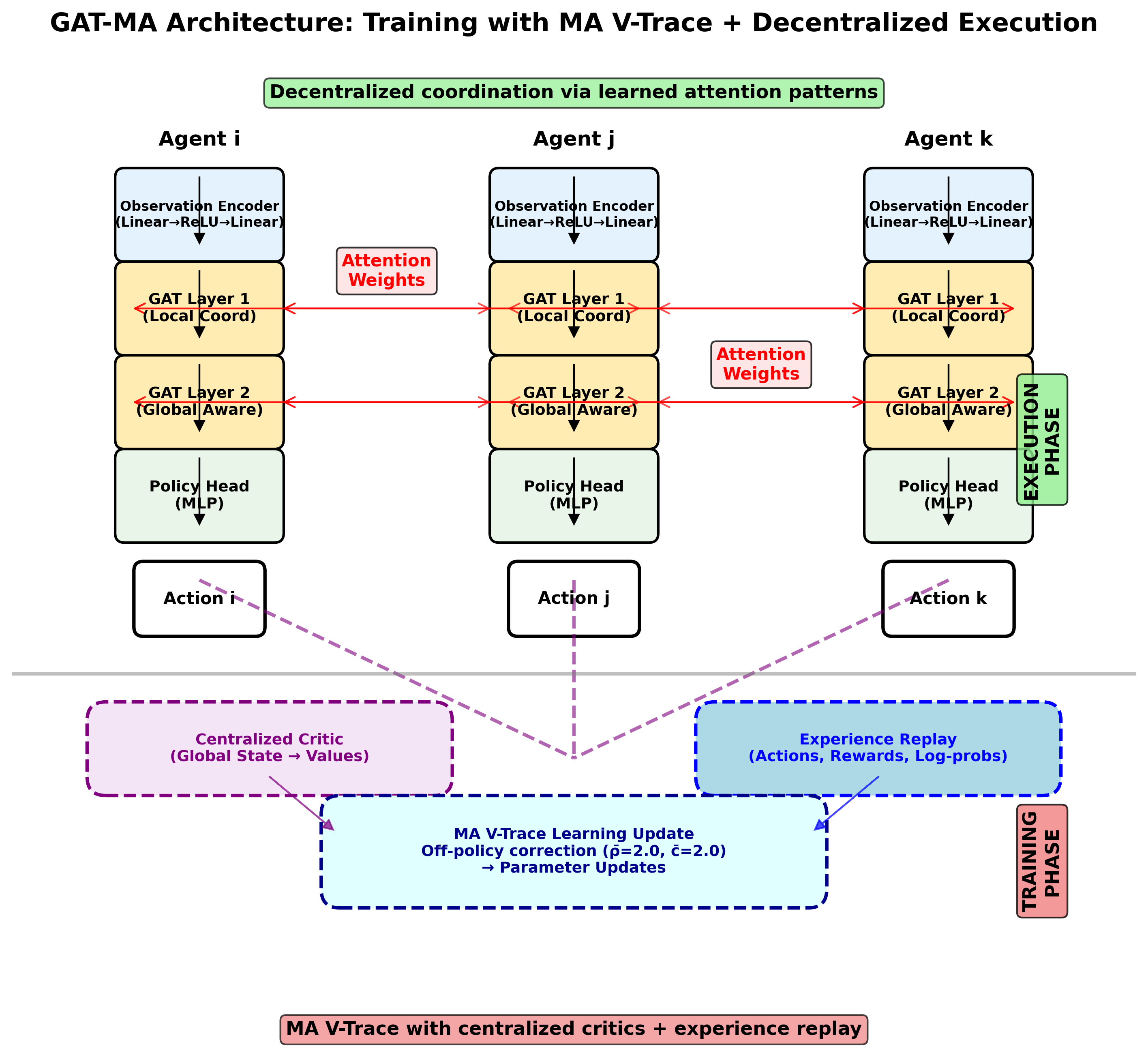
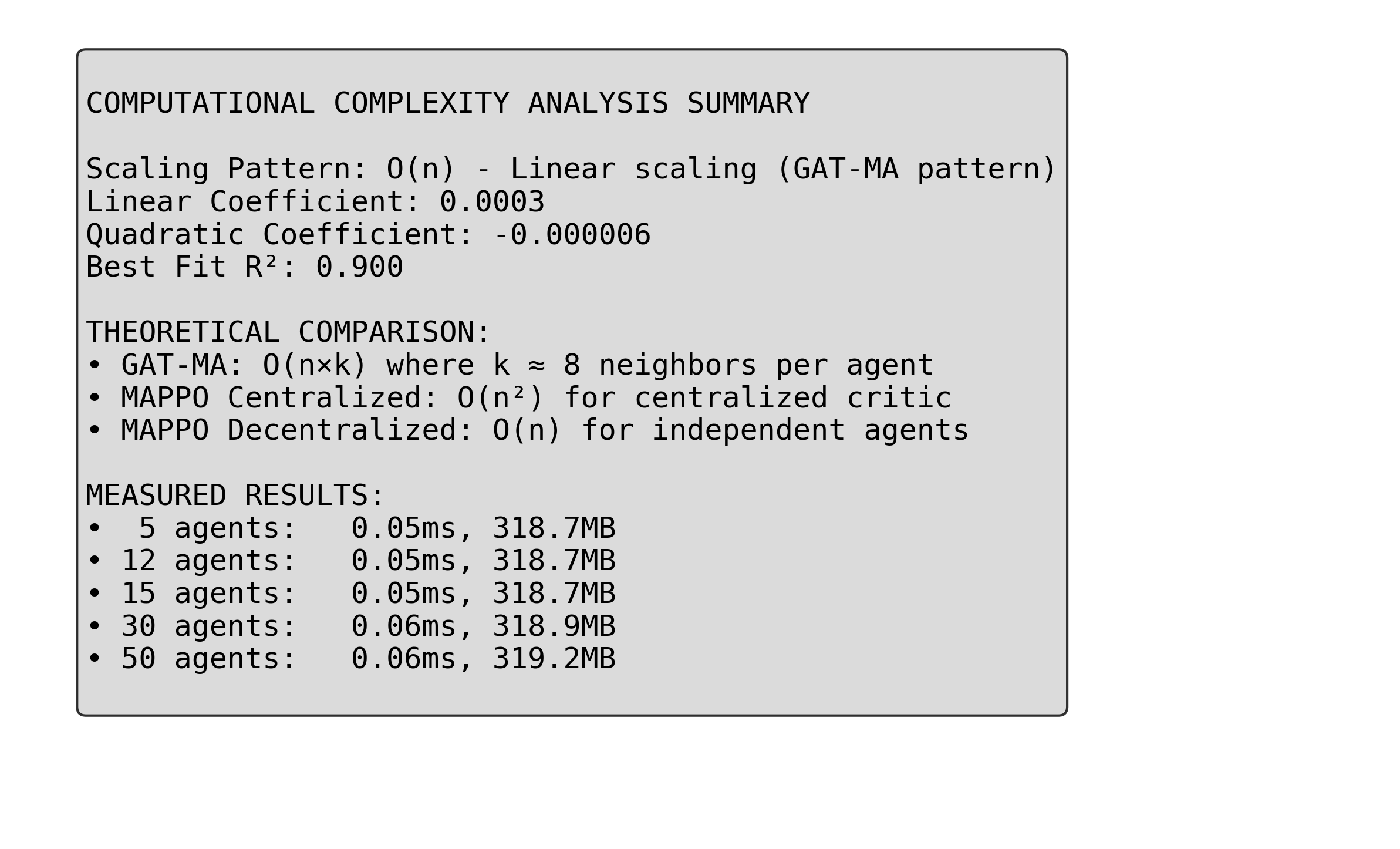
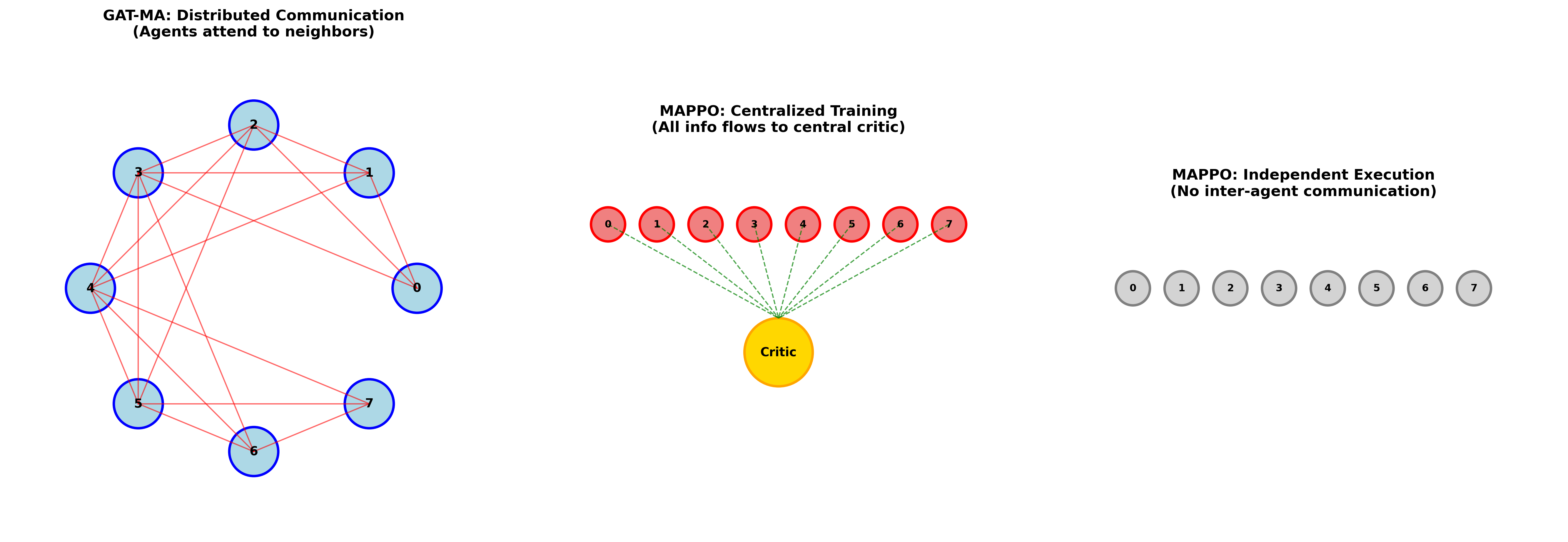
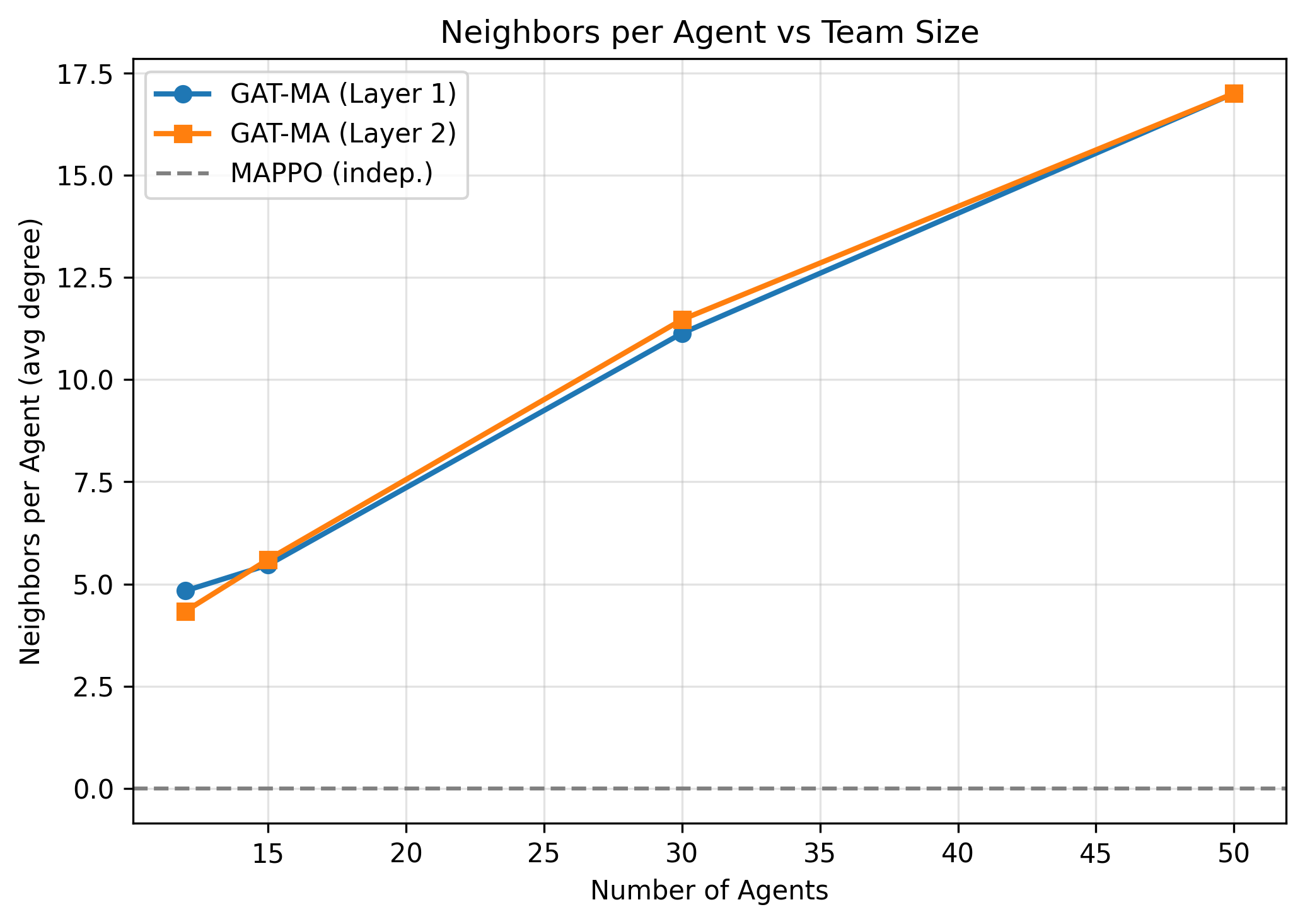
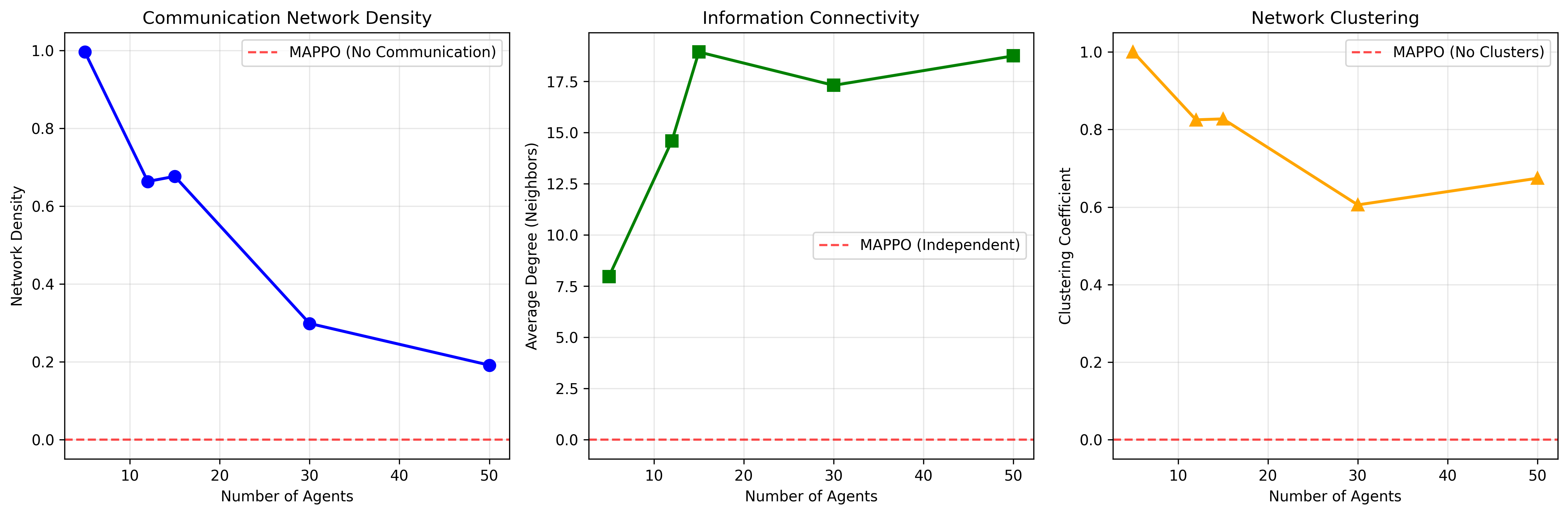
Architecture and topology
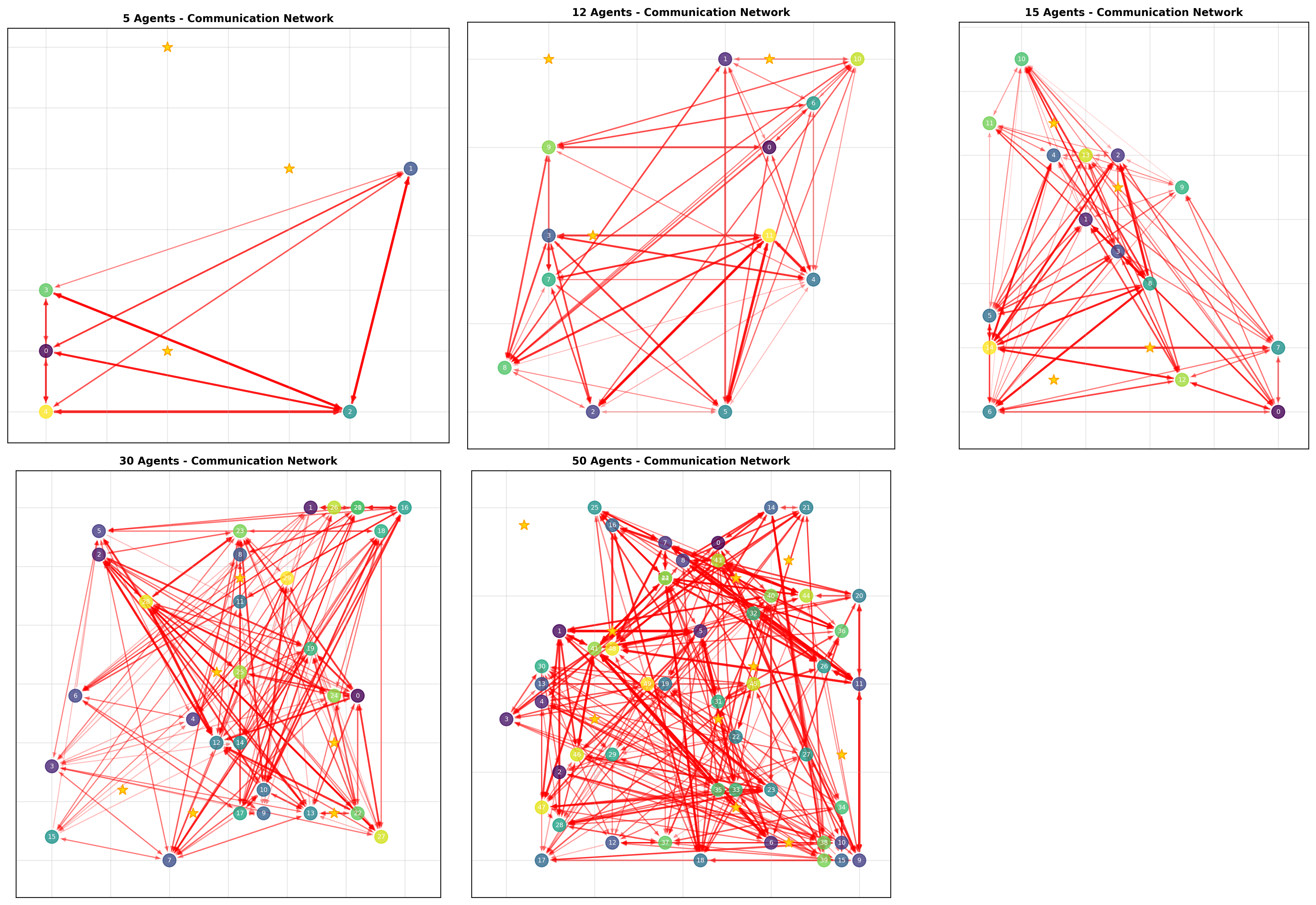
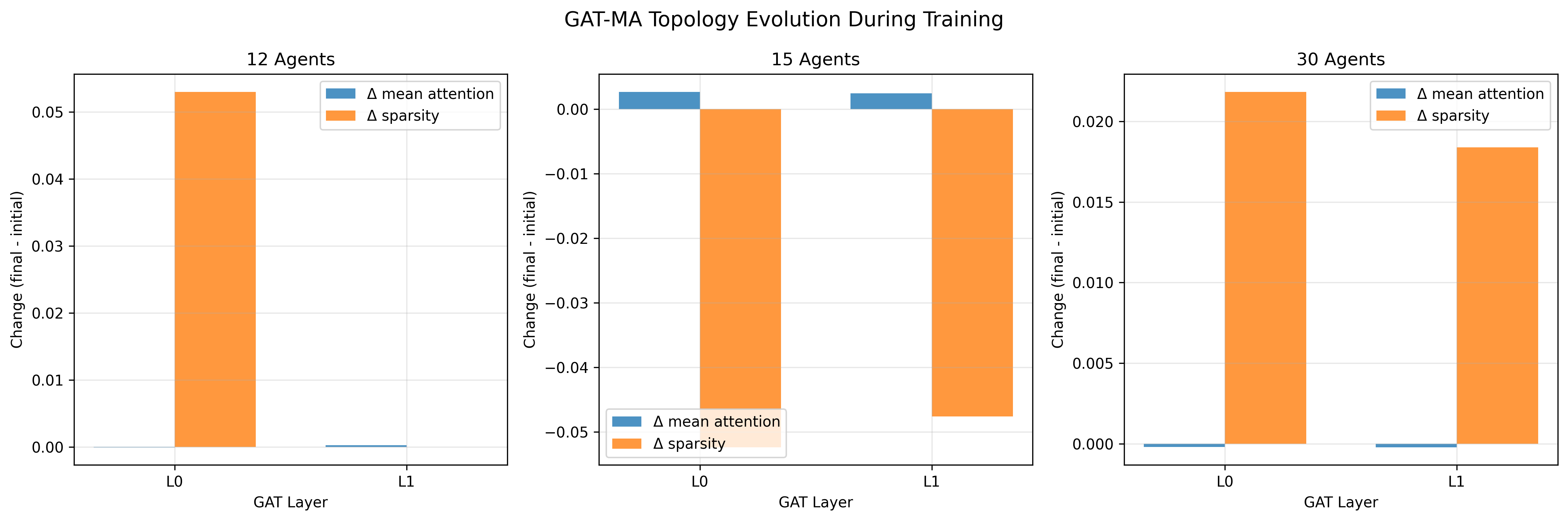
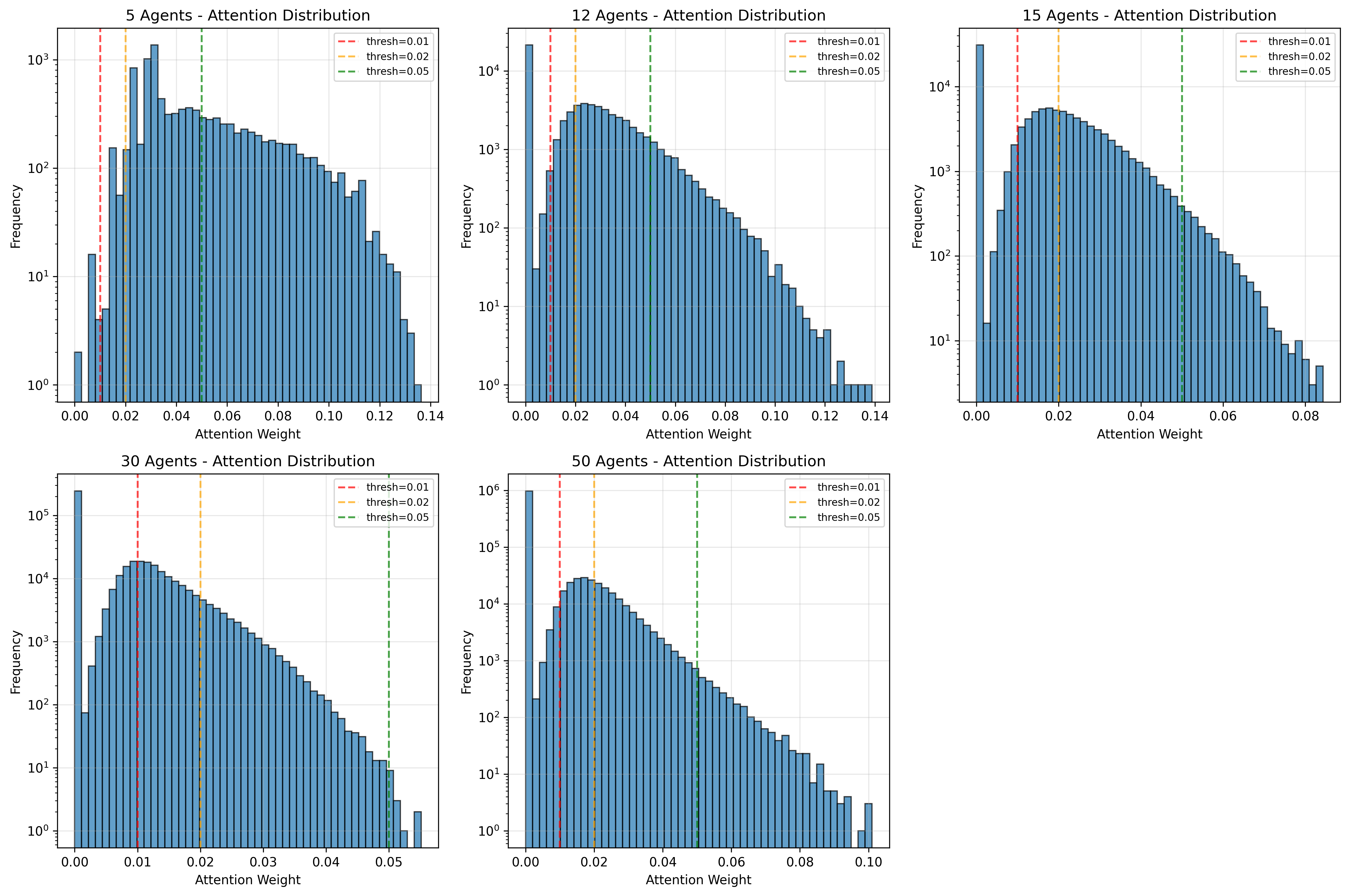
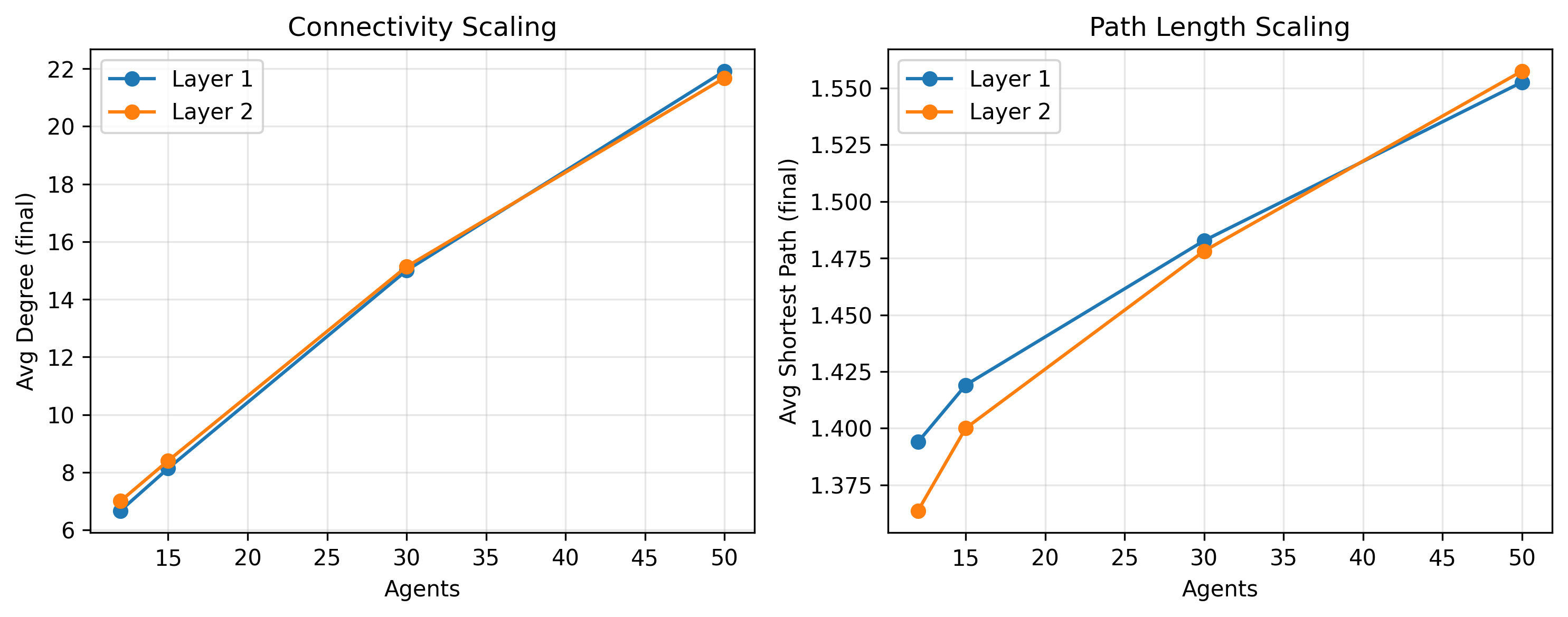
Scaling behavior
Episode gallery (GIFs)
Side-by-side outcomes across scales. Left-to-right progression shows how graph-structured communication keeps teams coherent as population grows.
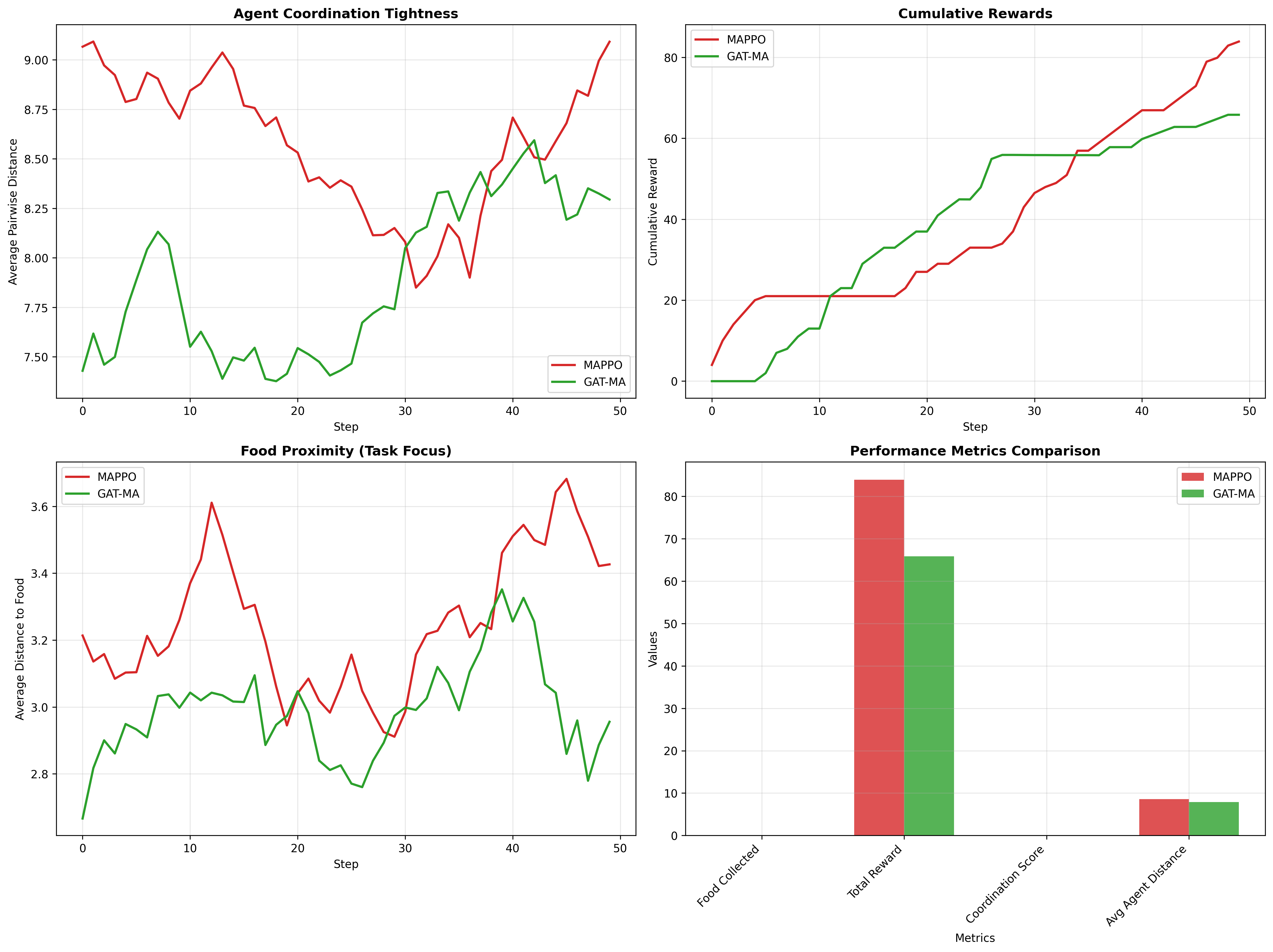
Analyses
Artifacts
Key figures are mirrored under assets/img/ for the site. Repository sources remain in docs/paper/assets/.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}